 |
 |
« Il faut avoir moins peur de l'intelligence artificielle que de la stupidité naturelle. »
|
La matière,
cette inconnue.
2 – Rôle de l'homme dans l'évolution de la matière inerte :
A – Du robot serviteur au robot évolutif :
a - Les robots et les programmes qui les animent :Les robots tels que nous les connaissons aujourd'hui appartiennent à deux grandes catégories :
- les robots serviteurs, qui vont de l'aspirateur autonome à la sonde spatiale,
- et enfin les robots dont l'intelligence nous surpasse.
- Les robots serviteurs :
Dans cette catégorie, se situent les robots industriels capables de seconder ou remplacer l'homme dans de nombreuses activités. Ils ne possèdent pas une intelligence qui les rend capable de prendre des décisions : ils répondent seulement à un programme préétabli qui leur permet de réaliser la fonction pour laquelle ils ont été conçus.
D'autres robots ont plus particulièrement une fonction d'utilité individuelle : ce sont les robots ménagers qui assistent les humains dans leur vie quotidienne. Apparus dans les années 2000, ces robots de service sont autonomes ou semi autonomes.
D'autres robots plus sophistiqués, comme le robot médical, demeurent toutefois contrôlés par l'homme.
Dans cette catégorie peuvent être rangées les prothèses pilotées par la pensée. Elles ont pour objet de suppléer à des handicaps majeurs.
C'est grâce à ce type de robots que , le 12 juin 2014, Juliano Pinto, paraplégique de 29 ans, a pu donner le coup de pied inaugural de la coupe du monde de football 2014. Son exosquelette, mis au point par l'équipe de Miguel Nicolelis enveloppait ses jambes et était commandé par des signaux électriques provenant de son cerveau.
Toutefois, dans ces cas-là, il s'agit plutôt de robots dont l'ordinateur interne, dénué d'autonomie, est dirigé par l'intelligence de l'homme.
- Les robots dont l'intelligence nous surpasse :
Ces derniers appartiennent à la catégorie des supercalculateurs à même de traiter une énorme quantité d'informations. Dans cette catégorie, on trouve également des robots évolutifs issus des dernières avancées de l'intelligence artificielle.
L'existence de tous ces robots nous donne une idée anthropomorphique de ce que peut être cette intelligence artificielle. Or, sait-on que, en dehors de toute structure matérielle, cette intelligence est déjà mise en œuvre dans les films qui exploitent les images de synthèse ? Dans ce cadre, elle a pour but principal d'organiser les comportements collectifs.
Ainsi, dans le film « le hobbit », une foule d'acteurs virtuels, mimant l'intelligence des êtres vivants,.sont mis en scène par des algorithmes.
Chacun des personnages se comporte et « pense » de façon autonome, en fonction des objectifs à atteindre, et de l'environnement dans lequel il évolue.
Des règles de comportement simples lui sont allouées, par exemple « face à un adversaire, se protèger avec son bouclier », ou bien « le pourfendre avec sa lance ».

Film le hobbit combat.
D'autres règles encore vont déterminer la distance entre les figurants, l'évitement d'un obstacle...
Ce sont donc les mêmes calculs qui gèrent le fonctionnement des robots les plus simples. Ces mêmes calculs ont montré comment s'organisent les battements du cœur, les motifs sur le pelage des mammifères, ou les enroulements des cornes et des coquilles.
Etres vivants et êtres mécaniques pourraient-ils être soumis aux mêmes lois ?
« De simples calculs peuvent mimer efficacement des comportements intelligents. »
Cependant, l' « intelligence » mise en œuvre dans les ordinateurs ou dans l'animation des robots est très différente de celle qui est mise en oeuvre dans le domaine scientifique ou celui du vivant.
En physique ou en chimie, les corps étudiés (atomes ou molécules) sont semblables et donc interchangeables. Un même calcul peut ainsi être utilisé pour des composés identiques.
Dans le domaine du vivant, par contre, chaque être possède une histoire propre, et, pour cette raison, un comportement variable.
La recherche en robotique va donc devoir tenir compte de paramètres empruntés au monde vivant, comme le passé (la mémoire), ou l'anticipation de l'avenir.
Comment, alors, approcher l'intelligence du vivant qui relève de la psychologie avec les moyens que possède la science ?
b - Les développements de l'intelligence artificielle :
1 - Comportements individuels et collectifs :
- Fonctionnement mécanique :
On peut admettre que les premières particules qui ont constitué l'univers, en tant qu'éléments simples, n'avaient pas d'histoire. Cependant, au fur et à mesure de leur complexification et des transformations subies, elles l'ont acquise. Dans cet assemblage où interviennent des forces de cohésion, des règles semblent agir, amenant les éléments à s'assembler ou se séparer selon les circonstances : ce sont ces combinaisons qui constituent leur histoire.
Ainsi, même si la matière, dans ses formes les plus simples, n'a pas d'histoire, on ne peut pas en dire autant une fois qu'elle a évolué et s'est complexifiée : elle possède donc, elle aussi, une histoire.
Pourrait-on trouver une similarité entre les fonctionnements simples que l'on peut trouver dans le monde vivant, et l' « intelligence » que l'on tente de donner aux robots ?
Le fonctionnement le plus simple qui intervienne dans le monde animal est celui des nuées d'oiseaux ou des bancs de poissons. On a longtemps supposé qu'un meneur coordonnait ces mouvements d'ensemble, comme c'est le cas chez les espèces animales les plus évoluées. Or, des chercheurs du laboratoire de robotique de la société Sony, comme Craig Reynolds, ont montré que, pour animer artificiellement des groupes réalistes, deux règles simples, appliquées à chaque élément du groupe, suffisent : la cohésion et l'alignement.
La cohésion pousse l'individu à conserver une distance moyenne par rapport à se congénères. Cette cohésion est maintenue grâce à deux autres règles : l'attraction qui rapproche des éléments trop éloignés et la répulsion qui les éloigne dans le cas contraire.
L'alignement lui fait adopter la même direction que ses voisins,
Ces règles simples suffisent pour que des individus constituent un groupe, puis se conforment au fonctionnement général.

Nuée d'étourneaux.
C'est donc à partir de ces deux règles que se construit le cadre où peuvent évoluer des nuées de petits robots. Chacun est doté du même programme que ses voisins et obéit aux règles précitées.
Voilà qui rappelle les assemblages au sein des atomes et des molécules, bien que les mécanismes qui entrent en jeu ne soient pas les mêmes. En effet, pour les êtres vivants, il s'agit du travail d'un ensemble de cellules nerveuses, alors qu'au niveau des éléments les plus simples, ce sont les champs de forces qui règlent les conditions d'assemblage.
Les êtres humains évoluent de manière identique dans une foule qui se déplace dans une direction privilégiée, par exemple lors d'une manifestation ou d'un mouvement de panique.
Le fonctionnement des nuées animales, traduit en langage informatique, donne de fait un aperçu d'un fonctionnement mécanique similaire à un comportement intelligent.
En effet, si le fonctionnement des groupes animaux tels que des bactéries, des fourmis, des étourneaux ou des sardines peut être reproduit par des logiciels informatiques, les fonctionnements humains simples n'échappent pas aux mêmes règles. Ainsi, l'écoulement de la circulation automobile est identique à celui des rivières : il répond aux mêmes principes de compression, ralentissement, décompression et accélération, de la mécanique des fluides.
On constate alors que le comportement humain sur route se révèle identique à celui d'une simple molécule d'eau dans le courant d'une rivière, même si l'homme semble capable d'ajuster son comportement de façon différente et décider, par exemple, de s'arrêter ou de changer de direction.
 |
 |
- Fonctionnement intelligent :
Plus complexes sont les fonctionnements des agents artificiels dits « cognitifs » dont les comportements intelligents se rapprochent de ceux des humains. Ils s'appuient pour cela sur un « raisonnement » qui tient compte des diverses possibilités d'action.
En fonction de l'approche choisie, celle de l'intelligence mécanique ou biologique, les chercheurs ont développé deux langages informatiques pour reproduire le comportement d'essaims d'insectes.
L'un traite les essaims de robots comme s'il s'agissait d'un fluide (système Optrad),
L'autre utilise les informations fournies par les individus (système Karma), comme le font les abeilles.
- Intégration de l'essaim dans son environnement - l'évolution incorporée :
Pour cela, des algorithmes ont été développés qui permettent l'apprentissage et l'échange d'informations entre robots. Lorsqu'ils sont mis en place sur chacun d'eux, le passage d'un comportement à un autre va dépendre uniquement des conditions environnementales.
Les paramètres de comportement sont stockés dans la mémoire de chaque robot.
Lorsque deux d'entre eux sont proches, ils échangent les informations qu'ils possèdent, lesquelles sont l'équivalent d'un génome, et conservent la nouvelle acquisition pour une utilisation ultérieure.
Au bout d'un certain temps, et en fonction des circonstances, le robot va exploiter le génome le plus adapté et « oublier » celui qui ne lui est d'aucune utilité, même si c'est son génome de départ. On parle « d'évolution incorporée ».
- Avantages de l'essaim sur l'individu :
Au cours des années 90, les premiers chercheurs qui ont programmé des essaims, ont pu montrer que les comportements collectifs observés étaient supérieurs à la somme des capacités individuelles.
C'est ainsi que, dans le cadre du projet européen SMAVNET (« Swarming Micro Air Vehicle Network », c'est-à-dire « essaim de drones en réseau ») un algorithme évolutionniste utilisant des conduites simples a permis à des drones de communiquer et d'établir ainsi un réseau de communication.
Ce type de comportements collectif, observé dans la nature, est l'aboutissement de milliards d'années d'évolution.
Il s'observe pourtant dès les premiers instants qui suivent le big-bang où toutes les particules au comportement chaotique finissent par s'assembler et trouver leur place pour former d'abord des particules élémentaires, électrons, photons et quarks, avant d'aboutir à des éléments plus complexes.

Nuées de particules – nuées de poussières – nuées d'étoiles – essaims - foules...
Pourrait-il alors y avoir un lien de parenté entre les forces d'attraction ou de répulsion au sein de la matière, le comportement robotique régi par un langage informatique, et les comportements des animaux guidés par des signes de reconnaissance ou même un langage plus élaboré ?
Quel lien existe-t-il entre des particules, des atomes, des molécules ou des animaux évolués tels que l'homme lorsqu'ils s'assemblent ?
En observant chaque étape des assemblages survenus au cours de l'évolution, on constate que le résultat final n'est pas la destruction (même si celle-ci peut exister à certaines étapes de l'évolution), mais une association qui aboutit à l'équilibre.
Un univers ionisé (constitué de noyaux positifs et d'électrons de charge négative) en perpétuelle agitation est stérile. Pourtant, cette agitation va favoriser les associations qui aboutiront à des particules plus stables. C'est seulement après cette association que les nouvelles particules neutres et stables vont pouvoir se combiner avec d'autres. L'équivalent d'un couple masculin féminin en somme !
Dans cette recherche de stabilité, n'y aurait-il pas de différence entre les particules et les êtres vivants ? Les deux seraient-ils en recherche d'équilibre, conséquence de retour au calme et source d'avancée évolutive.
Dans les sociétés humaines c'est cette même recherche qui amène des individus isolés au départ à associer leurs compétences pour un équilibre commun, ou des Etats à commercer et partager leurs sources d'énergie ou leur savoir-faire.
Or, dans le domaine de l'intelligence artificielle, un moyen autre que celui des simples champs de force a été mis en place pour lier entre eux des individus mécaniques : le langage informatique, ou langage mathématique,
Peut-on comparer, au sein de la matière, les forces d'attraction et de répulsion au « langage » des gènes dictant leurs ordres aux molécules, cellules et êtres organisés ?
Serait-ce ce « langage » qui relie chaque élément constitutif d'un essaim, comme semble le suggérer le langage informatique qui relie les robots entre eux ?
Jusqu'ici, on peut supposer que « l'intelligence artificielle » mise en jeu n'est pas une intelligence au sens où nous l'entendons, c'est-à-dire une intelligence dotée d'autonomie, capable d'acquérir des comportements communs, tout en conservant des capacités individuelles, et pourtant...
« L'échange d'informations est source de solutions nouvelles.. »
2 – Robot bébé et adulte – curiosité et attention :
On distingue actuellement deux approches dans le développement de l'intelligence artificielle.
Au cours des années 1970, la recherche en intelligence artificielle s'est attachée à reproduire les processus mentaux humains les plus évolués. Ce faisant, elle a négligé des mécanismes indispensables dans le monde réel, comme la perception, la prise de décision et surtout les interactions avec l'environnement.
Cette première approche, dite cognitive, consiste à partir de l'intelligence humaine, pour essayer de comprendre comment l'être humain adulte résout des problèmes, et d'appliquer ces découvertes aux robots.
Elle s'intéresse donc avant tout aux capacités d'intelligence les plus complexes pour tenter de les reproduire en intelligence artificielle. Cependant, cette méthode présente un inconvénient car chaque notion est extrêmement difficile à définir.
Prenons la couleur blanche par exemple. Dans l'approche cognitiviste, celui qui programme le robot doit déterminer ce que sont une couleur et ses différentes nuances. Or, si l'on prend l'exemple des Inuits, ils possèdent une importante capacité de discrimination des couleurs, utilisant plus de trente mots pour décrire le blanc et une centaine de termes pour dire qu'il neige. . On peut comprendre la difficulté.
La solution pour que le robot apprenne, est donc qu'il soit capable d'apprendre par lui-même.
Tant qu'un homme sera derrière lui, il sera comme un enfant auquel on donne tous les moyens d'évoluer et d'agir dans le monde. Mais sera-t-il capable de devenir un jour autonome ?
Depuis, les difficultés rencontrées au cours de cette approche ont amené les chercheurs à choisir une seconde approche, celle de l'apprentissage : il s'agit de partir de l'intelligence de l'animal ou du bébé et comprendre comment ses connaissances et ses comportements évoluent tandis qu'il explore son environnement.
C'est donc en s'inspirant d'animaux plutôt simples que les chercheurs ont abordé le problème.
Dans cette approche, aucun concept abstrait n'est nécessaire. Il suffit de programmer le robot en fonction de ce qu'il perçoit et de ce qu'il doit faire. Dans ce cas de figure, quelques capteurs suffisent pour que le robot soit capable d'évoluer dans un environnement.
Dès leurs premiers instants, les enfants répètent les mêmes gestes. Cette répétition est indispensable pour que commence l'apprentissage de leur corps et la compréhension du monde qui les entoure.
En répétant, les enfants expérimentent : ils observent, manipulent, construisent ou cassent... Ce faisant, ils affinent leur gestuelle et leur compréhension des fonctionnements du monde qui les entoure. C'est ainsi qu'ils développent leur intelligence.
C'est donc sur ce modèle que les chercheurs se sont appuyés pour réaliser des « robots – bébés » capables de simuler certains aspects du corps et de l'esprit d'un enfant. Ensuite, en perturbant l'environnement immédiat du robot – bébé, et en observant les comportements induits, ils ont pu en retirer des informations sur les mécanismes internes mis en jeu.
Le développement cognitif de l'enfant procède en effet des capacités naturelles d'auto organisation. Cette organisation se réalisera spontanément, en fonction de ses besoins et des circonstances, soit en fonction des repères inculqués dans son milieu social.
De même, le robot doit non seulement être capable de percevoir son environnement, mais également en découvrir l'utilité. C'est ainsi qu'il apprendra à rechercher sa nourriture (une alimentation électrique par exemple) pour se recharger en énergie.
Une autre capacité tout aussi fondamentale, la curiosité, pousse l'enfant à découvrir, créer, inventer.
Grâce à elle, il assimile progressivement, et dans un ordre rigoureux, une grande quantité de choses. Ainsi, avant de marcher, il apprend à tenir sa tête, puis à ramper, s'asseoir et tenir droite sa colonne vertébrale, et enfin se tenir debout en s'appuyant sur un objet. C'est au terme de toutes ces découvertes qu'il parviendra à marcher, en s'appuyant d'abord sur un objet, avant de devenir totalement autonome.
 |
 |
 |
 |
 |
Plusieurs équipes de roboticiens ont donc mis au point des robots qui découvrent, apprennent, et décident de la conduite à tenir à partir de modèles d'apprentissage basés sur des mécanismes d'exploration spontanée.
Ces robots apprennent en expérimentant : eux aussi essaient et observent les effets de leurs actes. Ce faisant, ils détectent les régularités qui surgissent entre une action et ses conséquences. Ils peuvent alors prévoir les conséquences de leurs actes, et réagir de manière adaptée.
 |
 |
Une situation nouvelle...
...est source de nouvelles réponses...
Le robot va alors pouvoir s'intéresser aux essais qui lui apportent des informations nouvelles, améliorent ses prévisions, et augmentent sa capacité à apprendre et à réagir. Ses comportements vont ainsi devenir plus efficaces au fur et à mesure de ses découvertes.
Toutefois, même s'il a trouvé une réponse adaptée à une situation donnée, il ne va pas en rester là : il va continuer à consacrer un peu de son temps à tester d'autres situations capables de le faire progresser.
C'est ainsi que les chercheurs ont pu constater, en mesurant le temps passé par le robot à explorer chaque situation, qu'il évite, tout comme les enfants, les situations qui ne lui permettent pas de progresser (qu'elles soient trop simples ou, au contraire, qu'il ne soit pas à même de leur trouver une solution). Il va toutefois les explorer épisodiquement et par hasard pour confirmer leur manque d'intérêt.
Au contraire, il va plutôt se consacrer aux situations de difficulté moyenne, pour lesquelles ses prévisions s'améliorent rapidement. Dès qu'une situation nouvelle est maîtrisée, donc prévisible, il l'abandonne.
Dans ces expériences, le robot apprend par lui-même, et les paliers cognitifs qu'il franchit, dans ses interactions avec les objets ou d'autres robots, surgissent sans qu'ils soient préprogrammés.
Les robots sont devenus aujourd'hui des outils de premier ordre pour explorer et mieux comprendre le développement comportemental de l'enfant.
C'est ainsi que le comportement du robot – bébé permet de formuler l'hypothèse que le cerveau de l'enfant privilégie les expérimentations qui sont juste au-dessus de son niveau actuel de connaissances et de compétence. On peut également supposer que tout être vivant est attiré par les situations nouvelles qui lui permettent d'apprendre, à condition que cet apprentissage ne se révèle pas trop ardu. Une fois la nouvelle situation comprise, l'ennui succède à la curiosité, et il l'abandonne.
Ainsi peut-on comprendre le comportement de l'enfant qui ne s'intéresse au jouet que le temps de comprendre son fonctionnement, puis l'abandonne. Fonctionnement très différent de celui de l'adulte dont l'intérêt réside le plus souvent dans la possession de l'objet.
La curiosité serait finalement un mécanisme qui découle de la nécessité de trouver des solutions. Elle consisterait à toujours rechercher la meilleure, afin d'atteindre le but poursuivi (trouver de la nourriture, par exemple). Plus tard, cette curiosité s'est étendue à la recherche de solutions aussi bien abstraites que concrètes.
 |
 |
 |
 |
Cette curiosité acquise par l'être vivant au fil des millénaires, le robot pourrait la posséder lui aussi, à bien plus brève échéance, grâce aux énormes progrès de l'intelligence artificielle et de la puissance de calcul.

«L'apprentissage est un élément déterminant
de l'adaptation à l'environnement. »
de l'adaptation à l'environnement. »
3 – Le robot évolutif :
L'intelligence artificielle a permis de cerner et reproduire le fonctionnement d'essaims d'animaux dont les comportements sont limités à un cadre précis. On peut se demander quelles étapes pourraient permettre d'aboutir à un robot qui soit capable d'adopter un comportement humain, et évoluer par lui-même.
Sans brûler les étapes, on constate qu'en fabriquant des robots qui testent de nombreuses solutions avant de parvenir à trouver la bonne, la science nous montre peut-être de quelle manière se comportent nos cellules : elles aussi testent, essuient de nombreux échecs, essaient à nouveau et finissent par trouver la meilleure solution pour résoudre le problème en cours. Peut-être ne possèdent-elles pas la conscience mais, tout comme les robots, elles pourraient bien posséder une certaine forme d'intelligence que nous n'avons pas encore la capacité de comprendre.
Les solutions trouvées par les robots....
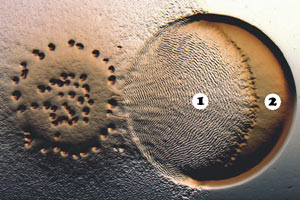
Ainsi, les bactéries Myxococcus xanthus (1), découvertes en 1941 par le naturaliste américain Charles William Beebe, se distinguent par leur aptitude à se regrouper en « essaim », à l'instar des fourmis ou les abeilles. Lorsqu'elles rencontrent des bactéries rivales comme Escherichia coli (2), leur comportement collectif implique des milliers d'individus. Elles avancent et reculent par vagues concentriques parfaitement synchronisées
...n'ont rien à envier à celles exploitées par les cellules..
Les chercheurs de l'université de l'Iowa (Ames, états-Unis) ont pu montrer que ce comportement collectif était induit par des variations chimiques du milieu.
On constate que les constructions mécaniques réalisées par l'homme dépendent autant des avancées de sa technologie que de sa capacité à imaginer de nouvelles approches de l'Univers, comme cela se fait en physique théorique, en mathématiques, et dans bien d'autres domaines.
De leur côté, les cellules ont construit l'outil extraordinaire que constitue l'homme. L'ont-elles elles aussi construit en tâtonnant, accumulant l'expérience de leur réussite et de leurs échecs, au fil des générations ?
Leurs constructions [cf : les cellules] qui les ont fait abandonner leur statut individuel pour devenir des organismes de plus en plus structurés, dépendent-elles à la fois des avancées de leur "technologie moléculaire" et d'une capacité à imaginer des solutions toujours nouvelles ?
Les cellules possèderaient-elles une intelligence capable de concevoir et expérimenter à partir de modèles, tout comme l'homme est actuellement en train de le faire ?
Pourquoi l'évolution se serait-elle faite uniquement par hasard et « élimination naturelle des ratés » ce qui lui ôte toute intelligence ? Et s'il en est ainsi, comment a-t-elle pu aboutir à l'intelligence et à la conscience de l'homme ?
Quant à l'homme, serait-il le seul à détenir l'intelligence ?
De plus, si l'on accorde une intelligence aux cellules capables de s'adapter à n'importe quelle condition environnementale, qu'en est-il de la chaîne d'ADN, assemblage de simples molécules qui, non seulement organisent les cellules en groupes de travail (pensée, digestion...), mais dirigent aussi leur comportement en fonction des circonstances et des besoins, coordonnant les actions de milliards de cellules totalement différentes dans leurs fonctions [Cf : les gènes sauteurs].
En travaillant sur l'intelligence artificielle et les robots, l'homme ne fait finalement pas autre chose que ce que font les gènes en construisant les cellules, et les cellules, pilotées par leurs gènes, lorsqu'elles construisent « l'unité d'action » que l'on nomme plante ou animal.
De l'ADN au "tout-robot" : si les formes et les structures sont différentes, le processus évolutif est identique.
«L'homme, en dotant le robot d'une intelligence adaptative,
ne fait pas autres choses que ce qu'ont fait les gènes et les espèces qui l'ont précédé.»
ne fait pas autres choses que ce qu'ont fait les gènes et les espèces qui l'ont précédé.»
4 – approche de l'intelligence des robots :
- Raisonnement stratégique et intelligence adaptative :
Pendant longtemps, les travaux se sont concentrés sur le raisonnement stratégique qui a permis des avancées spectaculaires dans le domaine des jeux. Ce sont ces avancées qui ont permis au programme Deep Blue d'IBM de battre le champion du monde d'échecs Kasparov.
Nous ne nous attarderons pas sur ces programmes hautement spécialisés dans un seul domaine : puisque, dans le domaine du vivant, ce sont les interactions sensorimotrices avec le monde qui structurent l'intelligence.
Si l'on s'intéresse aux véhicules « autonomes », ils exploitent bien des systèmes embarqués (donc conformes à une intelligence individuelle), mais ils utilisent aussi un système GPS de localisation. Ces véhicules sont donc semblables à des aveugles pour lesquels l'absence d'un sens diminue la capacité d'exploration du monde. Ils ont besoin de secours extérieurs qui leur indiquent où ils se situent dans leur environnement, à la différence d'un être humain qui conduit un véhicule motorisé en exploitant des capacités bien supérieures à la simple mémorisation d'une énorme quantité d'informations.
Ce dernier, en effet, après avoir appris les règles de conduite, apprend en regardant autour de lui, reconnaissant les signaux des policiers et la nature des travaux sur la route. Il apprend même à partir des erreurs, les siennes ou celles de son entourage.
Que serait le cerveau d'un humain élevé dès sa naissance à l'abri de toute interaction avec le monde extérieur : son programme génétique, aussi développé soit-il, serait incapable de lui donner le moindre soupçon de compréhension du monde dans lequel il vit, et peut-être même d'intelligence.
Quant à son corps, il ne survivrait qu'à condition de recevoir chaque jour sa ration nutritive.
Matière organique et matière minérale ne fonctionnent pas sur le même mode, les fonctions qu'elles possèdent sont des fonctions complémentaires. Elles sont à l'image d'un homme et d'une femme qui ne seront jamais inter-changeables, mais se complètent pour créer et gérer une famille, additionner leur créativité en société, et même aboutir ensemble à une plus large compréhension du monde.
- Compression des données et prédictions :
Nous avons vu que l'intelligence est liée à la capacité de repérer des régularités, c'est-à-dire des structures similaires dans les données auxquelles elle a accès. Cela lui permet ainsi de s'adapter rapidement à une situation lorsqu'elle se reproduit.
L'identification de ces régularités permet en outre de compresser les données recueillies, et même de prédire celles qui seront reçues ultérieurement. Si, par exemple, on reconnaît la structure qui lie les chiffres 0, 5, 10, 15, 20... cette suite pouvant se poursuivre à l'infini, on pourra la compresser ainsi : « suite de chiffres partant de zéro et auxquels on ajoute successivement le chiffre cinq ». On pourra alors prédire la suite : 25, 30,35...1 000 000, 1 000 005...
– Les développements de l'intelligence artificielle :
Pour parvenir à raisonner et résoudre des problèmes, il faut aussi être à même de changer de représentation du monde. Or, jusqu'ici, les informaticiens sautaient cette phase d'apprentissage pour donner au robot, dès le départ, une représentation du monde.
Aujourd'hui, les objectifs ont changé. Le but des informaticiens est désormais d'amener le robot a découvrir et acquérir par lui-même ce qu'il doit savoir pour accomplir une tâche, et le faire seulement à travers ses interactions avec l'environnement. C'est l'objet du projet européen DREAM initié en janvier 2015.
Chez le robot, comme chez l'homme, l'intelligence ne peut en effet émerger qu'à partir des comportements acquis progressivement, et non à partir de comportements préalablement intégrés.
5 – le rôle indispensable du corps :
Comment un robot peut-il acquérir des connaissances sans que celles-ci soient apportées par son programmeur ?
La reconnaissance faciale peut nous aider à le comprendre. Un ordinateur, grâce aux informations apportées par des caméras, va pouvoir trouver des régularités dans les visages qui défilent. Tout comme pour l'animal, l'œil est indispensable à l'ordinateur pour qu'il puisse découvrir et analyser par lui-même.
Or, l'œil est un organe dépendant du corps.
Alors ? Un cerveau artificiel sans corps est-il possible ?
Quand on voit les prouesses des supercalculateurs, tels Deep Blue (Kasparov), et Watson (Jeopardy), on pourrait penser que les ordinateurs comme les cerveaux artificiels n'ont pas besoin d'une enveloppe de chair. Mais cette absence a un prix : ces machines sont incapables d'interagir avec leur environnement et d'élargir leur domaine de compétence.
Chez tout être vivant possédant un cerveau, la première fonction de son corps est de rechercher des informations pour interagir avec l'environnement, et celle de son cerveau est de recevoir ces informations et de les interpréter en vue de réagir.
Un cerveau sans corps est un cerveau qui ne possède aucune capacité d'apprentissage : il est incapable d'aller au-devant des événements, incapable de voir ceux qui se déroulent dans son environnement proche, et incapable même de percevoir ceux qui interagissent directement avec lui. Il n'est pas plus capable de comprendre ce qui lui arrive qu'un ordinateur de bureau que l'on jette par la fenêtre.
En effet, l'expérience montre que le corps est indissociable du cerveau qui l'anime : un cerveau sans corps ne peut en effet connaître que les informations qu'on lui fournit.
Un corps immobile, homme, animal ou robot, possédant des capteurs visuels, pourra apprendre de son environnement immédiat, mais son apprentissage sera limité à cet environnement. Il va devoir se contenter des informations immédiates ou de celles qu'il reçoit. Des capteurs tactiles lui fourniront d'autres informations si un objet s'approche de lui et vient le toucher.
Seul un corps mobile va pouvoir chercher l'information, expérimenter par lui-même, et vérifier si celles qu'on lui avait mises en mémoire sont valides.
C'est son corps qui structure l'intelligence du bébé. Il en va de même pour le robot.
Un cerveau, biologique ou artificiel, ne peut être pleinement fonctionnel sans corps, que celui-ci soit lui-même biologique ou artificiel. Dans le cas du robot, ce n'est pas un corps semblable au nôtre qu'il importe de donner à son cerveau, mais des capteurs sensibles qui vont lui permettre de se situer dans l'espace, percevoir, vérifier ce dont il s'agit, tester les comportements possibles, et enfin réagir.
Sans la vision, impossible de voir.
Sans les articulations, impossible de tourner la tête, ni d'aller à la recherche des informations.
Sans le sens du toucher, impossible de ressentir ce que l'on ne peut voir.
Sans les articulations, impossible de tourner la tête, ni d'aller à la recherche des informations.
Sans le sens du toucher, impossible de ressentir ce que l'on ne peut voir.
Cognition et comportement sont en effet indissociables d'un corps sensible et autonome.
C'est d'ailleurs ce rôle central du corps, chez l'homme comme chez le robot, qui, bien mieux que la simulation sur ordinateur, permet de comprendre comment fonctionne et apprend le cerveau humain.
Pourtant, jusqu'ici, le rôle du corps dans la cognition a longtemps été négligé en robotique. Aujourd'hui encore, si le robot est capable d'agir en fonction d'un programme préétabli, il ne possède pas encore les « sens » à même de lui permettre de percevoir et interpréter par lui-même son environnement.
La nouvelle orientation de la recherche dans ce domaine est désormais de concevoir des robots capables d'évoluer sans aide dans un environnement inconnu. Le robot doit découvrir par lui-même à quoi sert le nouvel objet surgi dans son environnement, et il doit le faire de différentes manières, comme est capable de le faire un enfant : soit en interagissant directement avec l'objet, soit en observant comment les êtres humains ou d'autres robots l'utilisent.
Ainsi, grâce aux possibilités d'exploration que lui donne son corps, le robot va obtenir des résultats de deux façons :
- tout d'abord grâce aux informations indispensables préalablement intégrées dans son système par le programmeur : ces informations mises en mémoire sont l'équivalent du génome de l'être vivant qui, au départ, donne à celui-ci les moyens de reconnaître l'environnement,
- mais aussi au hasard des circonstances : dans ce cas, il devra faire lui-même le lien entre sa réaction non programmée et le résultat obtenu. Ce résultat fortuit pourra alors être intégré dans ses données pour être reproduit, plus tard, de façon intentionnelle.
Ce mode d'apprentissage correspond à celui d'un bébé de moins de deux ans.
La prise de décision reste cependant réduite à la solution de problèmes simples qui, bien que répondant aux besoins du programmeur, est limitée par l'architecture particulière des ordinateurs actuels. Aussi, les robots actuels ne sont-ils ni vraiment intelligents et autonomes, ni conscients. Pour que cela se produise un jour, les ordinateurs devront de plus en plus fonctionner comme le cerveau des mammifères.
6 – Les robots pourraient-il avoir un sommeil paradoxal ?
Dans cet objectif de compréhension de l'intelligence humaine, les chercheurs ont envisagé (projet DREAM) que les robots puissent aussi réorganiser leurs connaissances. Pour cela, le meilleur moment se situerait lors de la cessation d'activité. Durant cette période de « mise en sommeil », le « cerveau » du robot poursuivrait son activité pour restructurer l'ensemble des connaissances accumulées au cours de la journée. Tout comme au cours des rêves de l'être vivant, les expériences de la journée seraient « revécues » et intégrées dans le contexte des connaissances antérieures, pour en déduire un comportement plus adapté dans l'avenir.
Pour parvenir à ce résultat, deux types de programmes sont utilisés successivement : un programme d'apprentissage qui permet au robot d'explorer son environnement, d'exploiter ses capacités durant sa période d'activité, puis, durant les pauses, la mise en œuvre d'un deuxième programme qui va analyser les événements passés. C'est alors que le robot va pouvoir explorer diverses possibilités de réponse pour sélectionner la plus adaptée.
En fait, et étant donné la rapidité de travail en informatique, cette longue pause nocturne pourrait ne pas avoir de raison d'être. Plutôt que de parler de période de rêve comme le suggère l'appellation « Dream », on parlera de période d'analyse et d'élaboration de réponses, ce travail pouvant tout aussi bien se dérouler durant l'exploration de l'environnement.
La véritable « extinction » de l'activité correspondant à la nuit, servirait plutôt à réinitialiser le système en cas de perte de l'algorithme, tout comme il est nécessaire d'éteindre l'ordinateur pour réinitialiser son programme.
Ce qui est toutefois constaté, c'est que si le sommeil semble indispensable au mammifère et à l'homme, l'incertitude demeure pour la machine. Un ordinateur qui fonctionnerait sur le modèle du cerveau humain aurait-il lui aussi besoin de se reposer ? Les avis divergent sur ce sujet. On peut seulement citer au passage les travaux de chercheurs de l'université de Poitiers (Laurent Signac et Jean Denis Fouks) et du centre du sommeil du CHU de Poitiers (Joël Paquereau) qui ont dû ménager des plages de repos pour leur robot, car celui-ci perdait son efficacité lorsqu'il devait organiser toutes les informations qui lui parvenaient. Plus surprenant, durant ce temps de repos et de réorganisation, il était nécessaire que celui-ci soit immobile : immobilité qui est le propre du sommeil paradoxal.
Si, pour un cerveau électronique sans corps, les pauses sont superflues, elles semblent nécessaires pour le robot pourvu d'un corps.
Nous savons pourtant que chez l'homme, contrairement au sommeil, le rêve n'est pas indispensable, l'apprentissage se faisant immédiatement, dans le cours des événements. Le rêve n'a pour but que de réajuster le fonctionnement social dans un programme de vie individuelle [cf : Rôle des comportements sociaux].
On peut cependant considérer que seule l'actuelle limite de capacité de traitement des données informatiques nécessite ces longues pauses.
7 – Les robots pourraient-ils avoir une conscience d'eux-mêmes ?
- Les différents niveaux de conscience :
Actuellement, les informaticiens s'interrogent pour savoir si les robots seront un jour conscients.
Certains, comme le physicien Roger Penrose, pensent que la conscience est dépendante de la structure même des neurones : un cerveau électronique ne pourra donc l'acquérir.
Pour d'autres, au contraire, rien n'empêche de parvenir à mettre au point des programmes informatiques capables de rendre des robots conscients d'eux-mêmes.
Comment un robot pourrait-il devenir conscient ? Pour cela, il sera nécessaire de trouver une définition de la conscience qui diffère des normes de la conscience humaine.
- Le test du miroir :
On a longtemps cru que la conscience se limitait à la capacité de s'identifier comme distinct des autres individus et du monde. Cependant, tout comme chaque sens n'est qu'un élément de l'ensemble des perceptions permettant d'accéder à la conscience, la capacité de s'identifier n'en est qu'une composante.
Ainsi, le sens du toucher permet de ressentir, avec son enveloppe corporelle, la différence entre un objet et un être vivant ; et le sens visuel permet d'identifier des personnages semblables ou différents de soi.
Philippe Rochat (professeur de psychologie à l'Université Emory, aux Etats-Unis) propose cinq étapes dans le développement de la conscience de l'enfant.
la conscience de soi définie par le test du miroir n'est que l'un de ces niveaux : le troisième.
Ce test du miroir, imaginé par l'Américain Gordon Gallup dans les années 1970, consiste à apposer une marque sur le front du sujet à son insu. Lorsque l'individu ou l'animal constate le changement, on en conclut qu'il est conscient de son propre corps. L'enfant y parvient à partir de 18 mois.
Qu'en est-il des robots ?
On constate alors que, dans le test du miroir, un robot peut tout à fait se reconnaître, tant par sa morphologie, que par les mouvements de son reflet synchrones des siens.

C'est ainsi qu'en 2006, une équipe de l'université Cornell, (Etats-Unis), a créé un robot quadrupède à même de se représenter sa propre morphologie en exploitant une trentaine de tests simples. Ce robot peut repérer une « irrégularité » dans son image et même repérer un dommage morphologique.
Plus récemment, les chercheurs de l'université Pierre et Marie Curie, à Paris, ont mis au point un algorithme qui trouve une solution aux pannes en reproduisant le mécanisme de la créativité.
Lorsque le robot subit un dommage, l'algorithme trouve automatiquement un comportement qui ignore désormais les parties endommagées, apportant une solution au problème.
Ainsi, un robot à 6 pattes va trouver sans aide comment se déplacer avec les cinq restantes.
Cependant, les capacités d'auto évaluation et d'auto régulation de son propre comportement nécessitent, chez l'homme, un niveau élevé de conscience : elles mettent en jeu des tâches cognitives extrêmement complexes, comme la perception, l'apprentissage, le raisonnement, le langage et la prise de décision, tâches indissociables de la présence du corps ...
C'est donc grâce à leur corps que les robots vont pouvoir accéder à ces capacités. C'est pourquoi ils doivent être munis de capteurs, mais aussi de membres pour se déplacer et agir.
Chez l'homme, ces capacités cognitives améliorent généralement les performances ; cependant, elles peuvent aussi les diminuer, en imposant des calculs mentaux longs, et parfois inutiles pour trouver une solution. Cette diminution des capacités liées à des calculs prolongés et coûteux en énergie s'observe chez l'homme qui plonge dans la dépression.
C'est ici que les automatismes trouvent leur sens après la période d'apprentissage.
En effet, si l'on peut concevoir des robots qui sont capables de discerner dans quelles conditions un problème va nécessiter de longs calculs, ces robots gagneront en autonomie décisionnelle.
- le rôle de l'attention :
Pour cela, une autre capacité a dû être développée, celle de l'attention, que l'on observe chez l'animal ou le bébé confrontés à une situation nouvelle. Cette attention se traduit par une pause dans l'activité, tandis que tous les sens sont en éveil pour observer et comprendre la situation en cours.
C'est ainsi que, s'inspirant des modèles biologiques (projet roboergosum. De l'ISIR-Institut des Systèmes Intelligents et de Robotique, à Paris), des algorithmes amènent aujourd'hui les robots à décider eux-mêmes du statut d'une tâche. Si cette tâche est répétitive, la machine va développer des automatismes et sa vitesse de réponse sera améliorée.
Par contre, quand le robot détecte des changements imprévus, un système de « réflexion » comportant attention et délibération prend le dessus.
L'apprentissage dépend alors des résultats obtenus, mais aussi d'une auto évaluation qui permet de décider de la pertinence de la réponse, en fonction des buts à atteindre.
D'autres chercheurs ont, de leur côté, mis l'accent sur l'importance de la mémoire autobiographique, et la capacité à se situer dans le temps.
Franchir cette étape est nécessaire pour que les robots constatent des déficiences et puissent y porter remède.
L'architecture de cette intelligence artificielle coordonne plusieurs types de décisions.
Un premier programme de planification évalue les conséquences à long terme de l'action à mener pour aboutir à un résultat déterminé : c'est la délibération.
Parallèlement, le robot peut apprendre par essais et erreurs en testant des comportements pour atteindre le but souhaité.
Des « récompenses », basées par exemple sur la possibilité d'avancer à nouveau après avoir rencontré un obstacle, ou de ne pas tomber en panne détermineront le choix final du robot. Dans ce cas, le programme va se renforcer en fonction des associations faites entre actions et récompenses : le robot va alors passer en mode automatique.
Le terme récompense ne sous-tend pas ici une notion de plaisir. Pour sa survie, le robot va intégrer des obligations et des interdits dans son programme : par exemple, ne pas dépasser 3h d'activité pour recharger ses batteries. La « récompense » pourra être de pouvoir les recharger avant la fin de ce délai, la « punition » sera la panne encourue. Pour cela, la notion de temps devra faire partie du programme. Il devra évaluer le temps durant lequel il va pouvoir s'adonner à une tâche avant de rejoindre la prise de courant.
Cette capacité du robot à s'auto évaluer lui permet de détecter tout changement dans son environnement pour interrompre ses automatismes et délibérer à nouveau.
- l'importance de l'information :
Proposée par Giulio Tononi, neuro scientifique et psychiatre à l'université du Wisconsin (Etats-Unis), la théorie de l'information intégrée suggère que le degré de conscience d'un individu est indissociable de la quantité d'information intégrée dans son cerveau. Pour ce chercheur, on ne peut exclure aucune information, ce qui est transposable sur les robots.
On retrouve, dans cette idée, les éléments mis en place par l'évolution pour aboutir à la conscience [cf : l'édifice de la conscience] : aucune information ne peut être écartée.
La « prise de conscience » pourrait alors se résumer à deux règles simples :
- quelles sont les informations valides ?
- sont-elles utilisables ?
L'intérêt de cette théorie est de permettre d'estimer à tout moment le « degré de conscience » dans le cerveau du robot, tout simplement en mesurant la quantité d'informations qu'il contient : la mémoire serait donc essentielle.
Une telle mesure n'est, bien évidemment, pas possible dans le cas du cerveau humain.
- L'insuffisance de la mémoire :
Toutefois, on ne peut actuellement considérer que la mémorisation de données dans une machine est signe de conscience. C'est ainsi que l'équipe de Peter Dominey, à Lyon, a pu montrer qu'un robot peut mémoriser toutes les interactions qu'il a eues avec son environnement, puis les restituer en totalité sans que l'on puisse parler de conscience.
La mémoire seule ne peut donc être un signe d'intelligence ou de conscience.
La conscience n'intervient que lorsque la mémoire est corrélée avec toutes les autres informations qui parviennent au cerveau. Cela sous-tend la mémoire autobiographique, mais également les mémoires autobiographiques des congénères, le tout corrélé avec l'ensemble des perceptions que le sujet, ou le robot, ont du monde.
Toutefois, si l'on ne peut encore parler de « conscience » pour un robot, et alors même que nous avons évoqué la possibilité d'une « conscience » évolutive qui se perfectionne au fil du temps dans le domaine de la matière organique [cf : la construction de la conscience], on peut remarquer que les robots actuels suivent le même cheminement : ils perçoivent l'environnement avec leurs capteurs, analysent les données recueillies puis, après un temps de « réflexion » (c'est-à-dire de calcul), agissent.
B – Le cerveau artificiel :
Parallèlement au développement de l'informatique que l'on pourrait qualifier de « classique », à même de piloter les machines actuelles, une autre voie de recherche envisage de réaliser, à partir de silicium, un cerveau artificiel capable d'imiter le nôtre. Très avancé, ce projet pourrait bien devenir réalité.Il est mené par deux groupes de travail :
- D'un côté il y a le projet « SyNAPSE » (Systems of Neuromorphic Adaptive Plastic Scalable Electronics), lancé en 2008, Mis en œuvre par IBM, Hewlett-Packard, et un réseau de laboratoires américains, universitaires et privés il est financé par le Darpa (le département d'études avancées de l'armée américaine)
- De l'autre, le Human Brain Project, constitué du regroupement de 87 institutions de recherches internationales autour de l'école polytechnique fédérale de Lausanne et financé par l'Europe.
Le but est d'assembler des millions de neurones artificiels, fait de puces électroniques, pour construire des circuits électroniques reproduisant la complexité des cerveaux des mammifères, puis des humains, afin de reproduire les mécanismes de la pensée (raisonnement, décision, créativité...)
Actuellement, les neurosciences ne sont pas encore parvenues à comprendre comment fonctionne le cerveau humain, ni à dire comment naissent l'intelligence et la conscience...
Cependant, plutôt que d'attendre de pouvoir comprendre en totalité le cerveau humain afin de reproduire son fonctionnement, ces deux pôles de recherche proposent un autre cheminement : construire une machine qui reproduit son architecture et imite son fonctionnement. Cette décision s'appuie sur la remarque de Richard Feynman, prix Nobel de physique en 1965, qui écrivait dans l‘un de ses ouvrages : « ce que je ne peux pas créer, je ne peux pas le comprendre. »
Pour comprendre, il est en effet nécessaire de commencer par créer, afin de voir comment « ça marche ». C'est ainsi que, par essais, échecs et réussites, la connaissance du cerveau peut avancer. C'est la même démarche, nous l'avons vu, qui permet aux enfants de progresser [cf : les bébés robots]
Pour concevoir un cerveau artificiel, quatre grandes étapes doivent donc être respectées :
- Tout d'abord cartographier nos millions de milliards de connexions neuronales pour visualiser l'architecture générale des circuits cérébraux.
- puis fabriquer les circuit intégrés en silicium à même de mimer le fonctionnement biologique du neurone,
- ensuite, organiser leurs connexions sur le modèle du cerveau humain
- et enfin alimenter cette construction électronique en informations, tout comme le fait le système nerveux humain.
Concernant la cartographie, son développement a bénéficié d'une nouvelle technique d'imagerie révolutionnaire, l'I.R.M. par diffusion.

Fibres nerveuses de la substance blanche cérébrale :
les fibres rouges vont de droite à gauche,
les vertes de la partie antérieure à la partie postérieure du cerveau,
les bleues de haut en bas.
les fibres rouges vont de droite à gauche,
les vertes de la partie antérieure à la partie postérieure du cerveau,
les bleues de haut en bas.
La construction d'une puce (ou circuit intégré) a bénéficié elle aussi des progrès de la technologie. C'est ainsi qu'en 2012, IBM a mis au point deux puces « neuromorphiques », à même d'être connectées à plusieurs dizaines de milliards de puces identiques.
En ce qui concerne l'organisation des connexions, les résultats du projet Spaun (acronyme venant de Semantic Pointer Architecture Unified Network.) publiés fin 2012, sont encourageants : cette simulation a pu organiser le fonctionnement de 2,5 millions de neurones virtuels afin de reproduire des fonctions cérébrales humaines, comme compter, compléter des suites logiques et réaliser une écriture manuscrite, ...
Concernant l'apprentissage, le laboratoire de recherche de Google a, de son côté, mis en œuvre des algorithmes capables de concevoir seuls des catégories abstraites d'images, à partir de collections hétéroclites.
De son côté, le neuro scientifique sud-africain Henry Markram et son équipe du Blue Brain Project sont parvenus, en 2007, à simuler une colonne corticale de rat, élément du cortex qui regroupe environ 10 000 neurones connectés entre eux par 30 millions de synapses.
Leur simulation a permis d'identifier 240 types de neurones, et elle s'avère capable de prévoir comment les neurones se connectent avec une fidélité de 75 à 95 % par rapport aux mêmes observations faites in vivo.
Tous ces projets et leurs avancées soulèvent de nombreuses questions, tant philosophiques qu'éthiques. Par exemple, en dehors des questionnements sur leur capacité à accéder à la conscience, ces cerveaux artificiels pourront-ils ressentir des émotions ? Et quel statut devra-t-il leur être accordé dans une société humaine ?
L'une des caractéristiques des émotions est de permettre à l'être vivant, en cas d'urgence, de mobiliser l'ensemble de ses ressources afin de réagir dans le temps le plus court. On peut donc penser qu'une machine qui simulerait des émotions et leurs conséquences aurait plus de facilités à résoudre un problème.
Aussi, certains proposent-ils de programmer, dès le départ, les circuits des neurones de silicium pour qu'ils reproduisent toute la richesse d'une émotion.
Quant à l'accès possible de ce cerveau à la conscience, rien ne l'interdit a priori. Contrairement aux convictions de Roger Penrose, les théories actuelles suggèrent au contraire qu'à partir d'un certain degré de complexité, tout système peut faire émerger un état de conscience ».
C – Les risques de l'intelligence artificielle :
S'il est possible de contrôler des programmes prédéfinis, pourra-t-on contrôler des robots à qui leur l'intelligence confère autonomie et choix de comportement ? Seront-ils toujours prévisibles ?Cette question ne se pose pas encore pour les machines actuelles qui ont une faible autonomie et des capacités d'apprentissage limitées. Néanmoins, avec l'amélioration des performances de ces machines, un contrôle d'éthique deviendra indispensable.
a - Logique rationnelle et processus émotionnels :
Pour définir les risques liés à l'intelligence artificielle, il est d'abord nécessaire de définir l'intelligence biologique qui repose sur deux systèmes. Le premier, lié au cortex frontal, rassemble les processus de logique rationnelle. Le deuxième implique le système limbique et relève de l'intelligence émotionnelle.
Deux systèmes complémentaires fonctionnent donc en parallèle : un système émotionnel visant à la survie individuelle, et un système d'anticipation qui régule le comportement en fonction des conditions individuelles et sociales.
Vue latérale.
Coupe sagittale.
Ces deux formes d'intelligence sont indissociables du corps dont elles assurent protection, nutrition, information et locomotion. Les objectifs à atteindre nécessitent de placer tous les éléments qui nous entourent sur une échelle de valeurs. Le système limbique, pour sa part, indique les meilleures décisions pour le corps.
Le résultat obtenu par ces deux systèmes complémentaires permet d'améliorer les bénéfices tout en minimisant les risques.
Pour l'instant, le robot, au service de l'homme, privilégie la logique rationnelle : en effet, ses actions ne sont pas indispensables pour lui-même, mais seulement pour l'homme qui l'utilise.
b - Force du robot et faiblesses de la nature humaine :
Ce qui fait la force du robot dépend avant tout de son intelligence logique. Pour l'évaluer, il suffit de se rappeler les exploits des ordinateurs dans le domaine des jeux, et de s'intéresser à la conquête de l'espace.
Bien que remarquables, tous ces résultats sont à des années lumière de la capacité humaine à inventer des solutions nouvelles pour chaque problème inédit.
Pourtant, il n'est pas exclu que cette intelligence surpasse un jour la nôtre. En effet, sauf cas exceptionnels, dans des domaines très spécialisés (les calculateurs prodiges par exemple), notre cerveau montre des limites évidentes. Ainsi, notre cortex préfrontal ne peut traiter plus de deux stratégies en même temps, et la profondeur de son raisonnement ne dépasse pas « sept coups d'avance ».
Alors, si leur intelligence venait à dépasser largement la nôtre, et dans le cas où ils deviendraient autonomes, comment pourrons-nous communiquer avec eux ?
Pour l'homme qui en ignore le fonctionnement, une machine élémentaire peut sembler douée d'intelligence. D'abord parce qu'elle lui paraît imprévisible, mais aussi parce qu'il a une prédisposition naturelle à lui chercher des intentions.
à l'inverse, il lui est possible de croire qu'une machine très élaborée, dont les réactions sont toujours prévisibles, est dénuée d'intelligence.
Nous avons vu combien il peut être facile de prêter de l'intelligence à un être humain, simplement parce qu'il agit et pense comme nous [cf : influence]. De même, la confiance accordée à la machine peut aveugler l'esprit de celui qui est prédisposé à se laisser influencer.
L'adulte n'échappe pas à cette particularité de l'enfant qui prête vie et personnalité à une poupée. L'outil, en devenant un prolongement de son corps, acquiert lui aussi une personnalité. C'est ainsi qu'un rapport de l'armée américaine a montré que les soldats qui utilisent des robots interagissent parfois avec eux comme s'il s'agissait d'un être humain ou d'un d'animal familier.
Nos émotions sont indissociables de la communication, qu'elle passe par le langage ou la seule vision. On peut alors comprendre que l'apparence de communication nous fasse attribuer des intentions à des objets qui en sont dépourvus.
Les dessins animés appartiennent à cette catégorie d'objets inanimés qui utilisent des marqueurs extérieurs de l'émotion et paraissent vivants. Chacun a pu faire l'expérience d'éprouver une émotion en regardant un film : ce faisant, il n'a fait qu'attribuer une intention à un personnage virtuel, et lui prêter son propre vécu.
Image en deux dimensions
Personnage en trois dimensions
Le passage de l'image en deux dimensions au robot en trois dimensions est une étape facile à franchir étant donné notre capacité à prêter des intentions à des « personnages » qui ne possèdent que l'apparence de la vie organique.c - Danger relationnel :
Il est en effet difficile d'échapper à notre psychologie ! Ainsi, nous attendons d'un héros cinématographique ou d'un robot la même chose que d'un être humain : l'image ou la machine qui parlent doivent avoir des intonations conformes à leurs mimiques. Ils doivent donc être capables de solliciter notre empathie et s'accorder à nos désirs.
Le risque de manipulation devient alors réel, et il est important avant tout, de connaître les valeurs que les chercheurs en robotique vont intégrer dans leurs logiciels. Il est en effet possible d'adapter sur mesure l'apparence d'un robot pour qu'un humain s'attache à lui et lui obéisse mieux qu'il ne le ferait pour un autre être humain. L'engouement pour les tamagotchis apparus en 1996 en est un exemple frappant voire même inquiétant.
Jusqu'ici, ce que nous achetions et utilisions répondait à nos besoins et étaient à notre seul service. Ce n'est plus le cas avec l'objet connecté qui peut surfer sur Internet de façon autonome. C'est à la fois un serviteur parfaitement adapté à nos attentes, mais aussi un espion au service d'entreprises commerciales, ou d'une instance de contrôle, un serviteur à la fois pour notre plaisir et notre intérêt, mais aussi pour l'intérêt de celui qui crée notre besoin.
Car nous sommes à la merci de ce dernier si le but de notre vie se réduit à la seule recherche de biens de consommation. Or, être acteur de sa propre vie, c'est être conscient de la nécessité de l'échange avec les autres, et de l'équilibre indispensable entre soi et chaque élément du monde où nous vivons. Cet équilibre ne peut exister sans éthique et confiance.
Pour l'instant, alors que la « récompense » du robot consiste dans sa rapidité d'exécution, on constate que seule l'efficacité est privilégiée.
Dans le domaine collectif, notre intelligence formelle nous amènera à craindre ces machines dotées de compétences supérieures aux nôtres, et disposant de bases de données gigantesques qui échappent à notre contrôle.
Pour le cas où ces machines seront un jour capables d'émotions, il est indispensable de ne pas oublier l'une des caractéristiques de ces dernières : elles sont, chez l'homme et l'animal en général, source des réactions immédiates indispensables à la survie. Elles ont pour but de protéger son intégrité. Si les robots devaient acquérir ces capacités, ils les utiliseraient tout naturellement pour se protéger du seul prédateur capable d'attenter à leur « existence » : l'homme.
Qu'en est-il aussi de l'intrusion de l'intelligence artificielle dans le cerveau humain ?
d - L'intelligence artificielle dans le cerveau humain :
Les recherches en ce domaine avancent à grands pas. Des scientifiques comme Théodore Berger et son équipe du département de neuro imagerie de l'université de Californie du Sud (financés aussi par la Darpa), améliorent en permanence leurs circuits intégrés implantables.
Dans le domaine de la mémoire, l'objectif est de compenser les circuits lésés, ou d'accroître les capacités de mémorisation d'un cerveau sain. Les informations passeraient alors par des circuits artificiels dérivés où elles seraient stockées ou modifiées avant d'être réinjectées dans le cerveau biologique.
Ces chercheurs ont ainsi réalisé en 2006 un circuit intégré mimant une partie de l'hippocampe, (région cérébrale dédiée à la formation des nouveaux souvenirs). En 2011, ce circuit s'est parfaitement intégré dans le fonctionnement du cerveau de rats, et il peut même fonctionner comme un interrupteur de mémoire. Lorsqu'il est éteint, les souvenirs ne se forment plus. Allumé, la mémoire peut de nouveau enregistrer les informations. Les rats équipés de ce circuit ont ainsi obtenu, aux tests de mémorisation, de meilleurs résultats que des rats témoins.
Un an plus tard, ces prothèses ont été implantées dans le cortex préfrontal (siège de la prise de décision) de singes rhésus.
Dans cette expérience, les singes devaient participer à un test de mémorisation d'images. Une sonde transmettait l'information neuronale à un ordinateur chargé de la modéliser, puis l'information modélisée était redirigée vers le cerveau du singe, chaque fois qu'il s'apprêtait à prendre une décision.
Les résultats obtenus par les singes munis de la prothèse ont été améliorés.
e - L'importance de l'éthique :
La question qui va désormais se poser concerne donc moins les performances de ces machines, que les valeurs qui auront été intégrées dans leur programme.
Le but est-il seulement, pour l'industriel ou le donneur d'ordre, de faire le plus d'argent possible à court terme, pour l'acheteur, de s'installer dans le confort du maître servi par son robot esclave ? Les concepteurs prendront-ils en compte d'autres critères : le respect de l'homme dans une économie réelle, le respect d'un monde fragile que l'on risque de mener à sa perte ?
C'est pourquoi des projets, comme le Human Brain Project ou le projet SyNAPSE ne font pas l'unanimité. Car, derrière les progrès dans la connaissance de l'homme, se cachent des enjeux moins avouables. « L'intelligence artificielle » est aussi au service du renseignement, et la présence de la Darpa au cœur du projet américain est révélatrice du caractère stratégique de ces travaux
f - Le rôle des robots dans le monde de demain :
Tout cela amène à se demander si l'ère de l'intelligence de la matière minérale ne pourrait succéder un jour à celle de l'intelligence de la matière organique qualifiée de « vivante ».
Le passage à cette nouvelle étape dans l'accession de la matière purement minérale à la « conscience » va se faire par l'intermédiaire de l'être humain. C'est lui qui va déterminer l'avenir en léguant à la machine ses propres défauts (et nous savons à quoi ils aboutissent) ou en lui offrant le fruit de ses propres expériences. L'homme va-t-il renforcer l'égoïsme et la violence, au détriment du respect et de l'amour ?
Une dernière question essentielle se pose: « avons-nous vraiment besoin de robots ? »
Le bonheur est-il dans le « savoir » vivre, ou dans la possession d'objets qui seraient à notre service ?
« Avons-nous besoin de robots ?
Et, si oui, sommes-nous capables d'intégrer des règles morales
à leur intelligence ? »
Et, si oui, sommes-nous capables d'intégrer des règles morales
à leur intelligence ? »
Que retenir ?
Nous pouvons observer aujourd'hui comment la matière s'est transformée et a accéléré son évolution jusqu'à aboutir à des composés complexes. Ces composés, en s'assemblant et en communiquant, parviennent à réaliser ce que nous nommons « intelligence ».
On peut comprendre l'intelligence des robots, puisque l'intelligence de l'homme les programme.
On peut comprendre l'intelligence de l'animal capable de s'adapter à son environnement.
Mais, au niveau de la matière, comment est-on passé du « comportement » de la particule lequel semble se faire en aveugle, au comportement collectif « intelligent » des composés complexes ?
Peut-on parler même de comportement en aveugle de la particule, ou ne pourrait-on envisager que la matière évolue en se posant elle aussi des questions ?
Allons plus loin encore : est-ce vraiment l'homme qui se pose des questions, lui qui est déterminé par des processus inhérents à la matière? Est-ce lui qui s'interroge, ou la matière même dont il est constitué ?
Les piliers de la création.
https://www.youtube.com/watch?v=hZ7zGUFDOsg